I am currently a second-year Master's student at Northeastern University studying Artificial Intelligence.
I graduated from the University of Connecticut in May 2024. I am passionate
about machine learning and computer vision. Through my internships, coursework, and personal
projects, I have developed cross-disciplinary skills in computer science, electrical engineering,
and mechanical engineering. My goal is to pursue a career as a
machine learning engineer for physical systems and solvng complex problems
such as autonomous driving and surgical robotics.
My current research interests lie in the intersection
of machine learning and computer vision in physical systems, along with natural language processing.
As a member of the Silicon Synapse Lab,
I will be investigating various real-time Electronic Image Stabilization (EIS) techniques for a flapping-wing robot,
as this lightweight platform isn't capable of carrying a gimbal or other stabilization hardware.
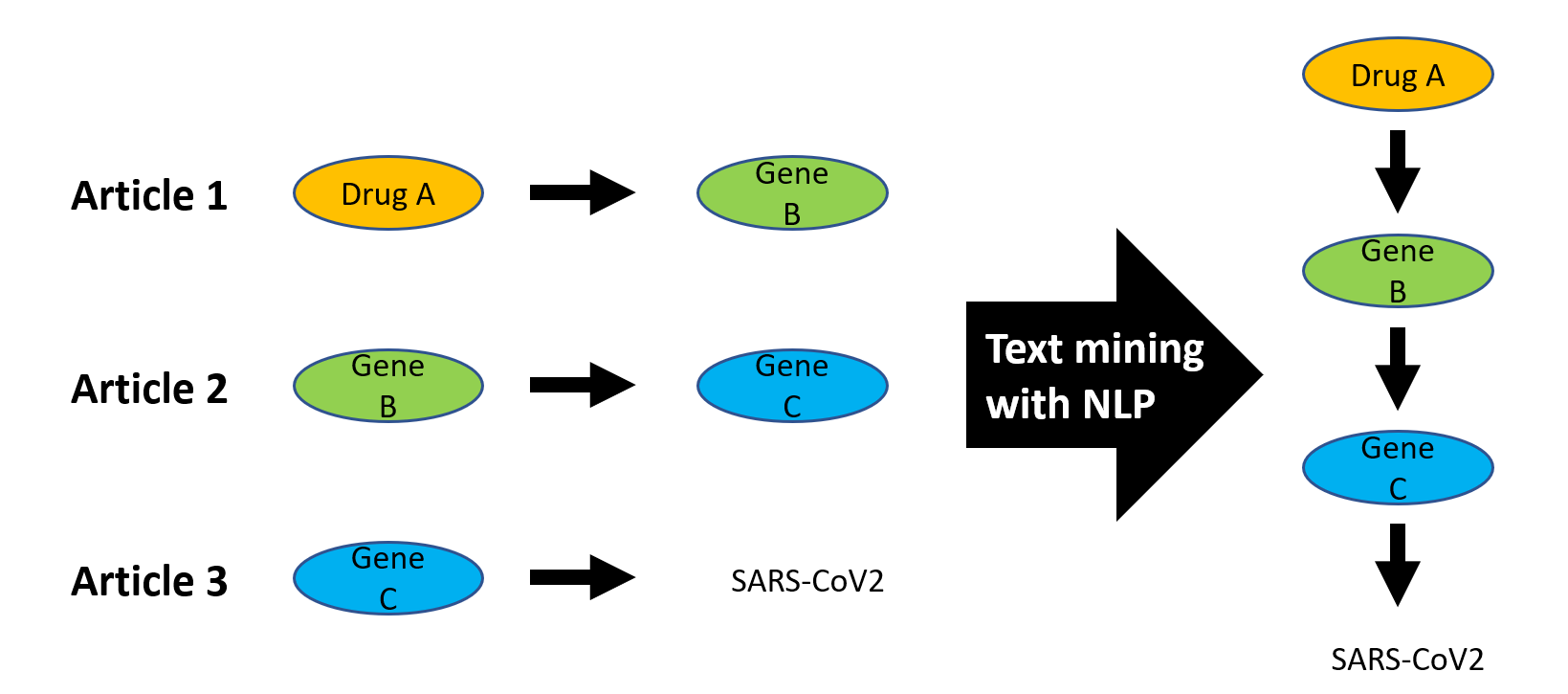
As a member of the Aits Lab,
I explored key models such as BioGPT
and SciBERT for relation extraction in biomedical literature using annotated corpora including
BC5CDR,
ChemProt,
and DrugProt.
Specifically, I used a combined
ChemProt and DrugProt corpus for SciBERT fine-tuning
and improved precision, recall, and F1 score by 5%.
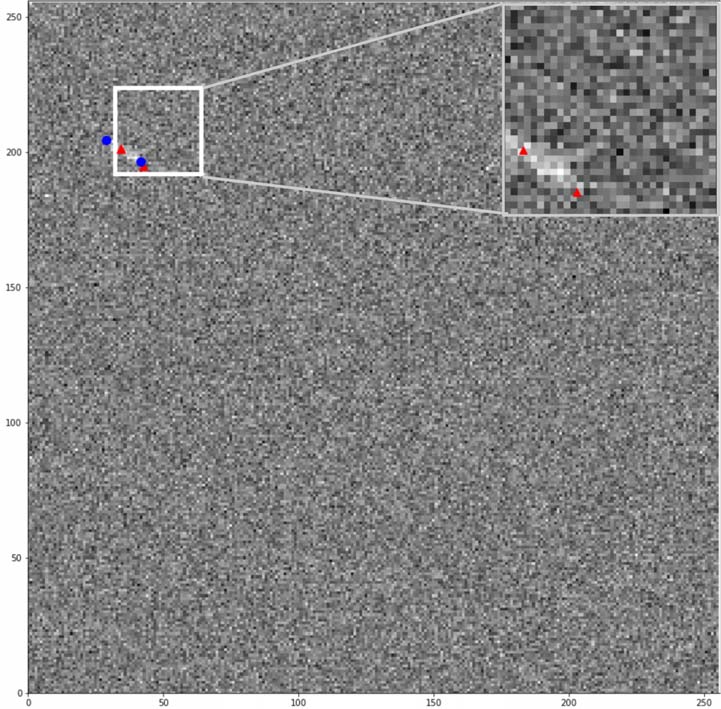
This paper presents computationally efficient CNN models for detecting and localizing streaking targets from an
optical sensor's Focal Plane Array. When compared to state-of-the-art (SOTA) probabilistic techniques, the machine learning models
were 340 times faster for detection and approximately 360
times faster for localization on full size 256x256 images. For detection, the ROC AUC was 0.94 for the ML
model and 0.85 for the SOTA model. For localization,
the MSE was 0.0351 for the ML model and 0.243 for the SOTA model.
Education
Northeastern University, Boston, MA, USA Sep. 2024 to May 2026
Master's of Science, Artificial Intelligence
Concentration: Vision (Thesis Track)
University of Connecticut, Storrs, CT, USA Sep. 2020 to May 2024
Bachelor of Science in Engineering, Computer Science and Engineering, Mathematics Minor
Lund Institute of Technology (LTH), Lund, Sweden Jan. to Jun. 2023
Study abroad semester taking courses in computer vision, databases, and process simulation
Work Experience
Engineering Development Program (EDP) Intern, Travelers Indemnity Co., Hartford, CT
Jun. to Aug. 2025
Working with the Business Insurance (BI) Location Intelligence team to automate the process of manual worker's compensation and reinsurance adjustments
and computing AI-based metrics. Won 1st place at the intern hackathon for a novel approach to automate filing auto collision claims.
Systems Modeling Consultant, Qualtech Systems Inc., Rocky Hill, CT
Jan. 2024, Sep. 2024 to Apr. 2025
Created Simulink Plant model with custom libraries using Stateflow blocks to model a NASA rocket propulsion system and tested fault injection. Also, worked on fine-tuning 3D generative AI model
for developing training materials for the US Marine Corps.
Engineering Development Group Intern, The MathWorks Inc., Natick, MA
Jun. to Aug. 2023
Designed and implemented a REST API feature with asynchronous support to facilitate integration with MATLAB and other language environments.
Undergraduate Teaching Assistant,
University of Connecticut, Storrs, CT
Aug. to Dec. 2022
Assistant for CSE 2301 - Digital Logic Design. This course covered the fundamentals of Boolean Algebra and Transistor-Transistor Logic where students applied their skills in weekly labs. I assisted with labs, grading exams/reports, and hosted office hours.
AI/ML Summer Engineering Intern, Medtronic, North Haven, CT
Jun. to Aug. 2022
Deployed an SVM model on the Signia surgical stapler for staple quality assessment based on sensor measurements. Also, I trained a CNN model for visual staple quality
assessment.
AI/ML Engineering Intern, Lockheed Martin, Shelton, CT
May to Jul. 2021
Part of (Neural) Network Training and Deployment IRAD team developing an ML-based object detection
model for the Stalker XE drone.
This project entailed developing a dynamic hand gesture recognition system from a webcam feed for computer control. The goal was to enable intuitive interactions without
the use of keyboard and mouse that mimic common touchscreen/tablet gestures. Our system recognizes scrolling up/down, zooming in/out, and switching applications
left/right. For this project, we developed all stages of the ML workflow, including data collection, model training/validation, and deployment interface.
It can be reused for support of new gestures and computer controls.
The goal of the project is to provide beginner bicyclists with an easy learning experience when first using a CVT equipped bike,
and to ensure a more efficient ride for advanced cyclists.
In collaboration with Transcend Bicycle, UConn CSE Team 11, and ME Team 50,
I developed the hardware and software infrastructure for the CVT controller that would perform gear shifts automatically.
This involved the use of Simulink to model the Human-Bike-CVT system and test the controller in various real-world scenarios,
as well as the Embedded Coder Toolbox to automatically generate C code that was deployed on our microcontroller.
The goal of this project was to build a fixed-base two DOF articulated manipulator that would play Cup Pong.
The manipulator was built with 2x Dynamixel MX64-AR motors and supporting mounting hardware, as well as a
Lego NXT motor for turret actuation. The microcontroller used was a Raspberry Pi 4. The camera used was
a Raspberry Pi Camera Module v2.1. For cup detection, 100mm 6x6 ArUco tags were used and distance was
calculated via the calibrated camera using OpenCV.